")

1. Kustrobotbatteriet flygfotograferat på F 17 under grundutbildning 1995.
Johnsson, Peter-Lorentz / Museum för rörligt kustartilleri
")
1:a Kustrobotbatteriet med robot 15
Bakgrund till ny anskaffning
Som beskrivits i artikeln "Så fick kustartilleriet tung kustrobot" hade den tidigare roboten 08 börjat nå slutet på sin livslängd under 1980-talet. Det var inte bara roboten som var på slutet av sin livslängd utan det gällde även fordon och en mängd annan utrustning i förbandet.
Det nya förbandet fick typbeteckningen ”Tungt kustrobotbatteri 90”. Efter de sedvanliga politiska diskussionerna blev det bara ett förband; ”1.Tunga kustrobotbatteriet” var beteckningen på krigsförbandet.

Utveckling av nytt förband - prov och försök
För att utveckla ett nytt tungt kustrobotbatteri sattes det upp ett provturskommando (PTK). Detta hade till uppgift att genomföra prov och försök med bland annat en prototyp av en robotbil liksom en plutonledningscentral (PLC), vilken senare utvecklades till en batteriledningscentral (BLC). Försöken genomfördes huvudsakligen under åren 1988-89. Förutom prov med fordonsmaterielen genomfördes omfattande sambands- och samverkansprov med huvuddelen av marinens aktuella förband samt även med övriga av förband, som var aktuella för samverkan.
Utvecklingen av robot 15 MK.II gjordes av SAAB och blev färdig något senare än planerat. Ett relativt omfattande utvecklingsarbete genomfördes åren 1993-94 med stöd av KA 2 personal avseende utformning och handhavande av ledningssystemet för roboten.
Med resultaten från provtursverksamheten och övrig utveckling framtogs det nya tunga kustrobotbatteriet. Under grundutbildningsåret 1994-95 prövades den nyutvecklade förbandsmaterielen och nya metoder för utnyttjande och handhavande. De nya taktiska och organisatoriska målsättningarna med förbandet verifierades likaså. Sammantaget föll det väl ut och försvaret fick ett toppmodernt förband för sjömålsstrid på långa avstånd.

Förbandets uppgifter
Tungt kustrobotbatteri var ett operativt rörligt förband och med det menades att förbandet skulle kunna verka inom samtliga militärområden och dessutom kunna förflytta sig självständigt mellan militärområdena med egna resurser. Batteriet skulle i samverkan med övriga sjömålsbekämpande system kunna lösa taktiska uppgifter i såväl skärgårdsterräng som vid öppen kust. Kustrobotbatteriets främsta uppgift var att bekämpa fientligt framträngande med landstignings- och transporttonnage men även fientliga sjöstridskrafter.
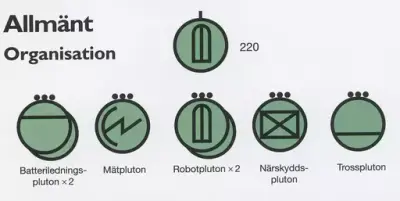
Organisation
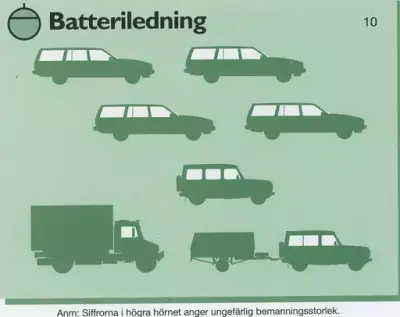
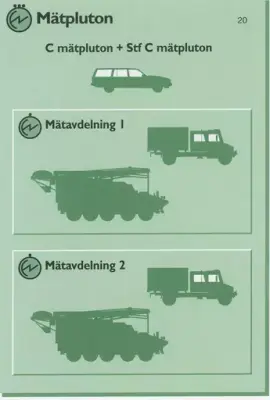
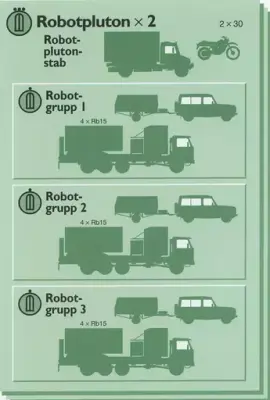
Förbandet var organiserat så att det med egna resurser kunde verka helt självständigt. Det är ju robotarna som är stridsmedlet i förbandet och det fanns två robotplutoner. Varje pluton hade tre robotbilar med fyra robotar på varje bil. Det innebar att förbandet hade 24 sjömålsrobotar i sin reglementerade utrustning. För att kunna finna de mål som förbandet fick uppgift att bekämpa fanns en mätpluton som var indelad i två mätavdelningar. Varje mätavdelning bestod bland annat av en radarstation PS 902. Under senare delen av förbandets tillvaro utvecklades en ny splitterskyddad radarstation ARTE 740. Förbandet hade inte hunnit utrustas med den innan det lades ned år 2000. För att leda förbandet hade chefen till sitt förfogande två batteriledningsplutoner som innehöll den sambands- och ledningsmateriel som erfordrades för att kunna leda i två riktningar. Förbandet underhölls av en trosspluton. Trossplutonen innehöll plutonstab, reparationsgrupp, kokgrupp, förbandsplatstropp(sjukvård) samt en pack/drivmedelsgrupp. En förutsättning för långa transporter och självständigt uppträdande. För markstrid och bevakning av förbandet fanns en närskyddspluton med två närskyddstroppar. Detaljerade bilder på förbandet finns i slutet av denna artikel.

Gruppering
Beroende på uppgift samt terrängförhållanden grupperade förbandet, utom radarstationerna, mellan 10 och 50 km från kusten. Förbandets grupperingsområde kunde variera med en bredd på 5 till 20 km och ett djup på 3 till 10 km. För att försvåra för fienden att upptäcka och identifiera förbandet grupperades enheterna i förbandet i så stor utsträckning som möjligt i byggnader eller till exempel under broar och viadukter. Förbandet var utrustat för att kunna grupperas fritt i terrängen med modern maskeringsmateriel, för att maskera mot såväl visuell som termisk upptäckt. Förutom skydd och maskering av förbandet så beaktades även skydd mot fiendens verkan, goda sambandsmöjligheter och goda möjligheter till nödvändiga transporter. Mätavdelningarna grupperades så tillbakadraget som möjligt med hänsyn tagen till det mät- och spaningsområde som förbandet hade uppgifter inom.
Som framgått av förbandets organisation kunde det användas delat i två operationsområden/ operativa riktningar samtidigt, till exempel för lösande av uppgift i västra Sverige för skydd av Göteborgsområdet samtidigt som andra hälften av förbandet löser uppgifter i Gotska sjön.

Marsch och transport
Hela förbandet kunde transportera sig med egna resurser. Eftersom det var en helt ny fordonspark i förbandet, kunde man hålla en förhållandevis hög marschhastighet. Under utbildningsåret 1995 genomfördes flera tester av förbandet för att undersöka om det kunde uppfylla de taktiska krav som man ställt. Bland annat genomfördes en förflyttning på 800 kilometer samt gruppering av förbandet, som då var stridsberett, inom ett dygn. Detta måste betraktas som en riktig prestation även om vägnätet var fredstida vid försökets genomförande.
Under längre marscher/ förflyttningar delades förbandet upp på tre taktiska enheter/ kolonner som följde tre olika marschvägar mot nästa grupperingsområde. Detta gjordes för att dels, inte ”lägga alla ägg i samma korg” men också för att undvika en alltför lång kolonn av fordon längs en och samma väg, vilket kunde ha blivit svårhanterat.



Samordning av sjömålsstriden
Information om de sjömål som skulle bekämpas kunde inhämtas med hjälp av de radarstationer som fanns i förbandet. Detta var dock inte normalförfarandet. I första hand erhölls mållägesinformationen från marinkommandostab. Orsaken till detta förfarande var att när man börjar sända med en radarstation så avslöjar man att man finns och var man finns. Därför använder man sin radarstation när man inte har något annat val. Övriga sätt att få mållägesinformation kan vara från fartygsförband, andra radarstationer, flyg och helikoptrar. Under utbildningsåren 1995 och 1998 övades mållägesinformationsinhämtning från samtliga nämnda källor och från samtliga då förekommande marinkommandon.
Ett system som robot 15, som fanns vid såväl flygförband som fartygsförband kräver någon slags ordning för ett effektivt utnyttjande av stridsmedlet. Vid kustrobotbatteriet fanns det en liten grupp om två personer – robotledare. Dessa utgrupperades hos högre chef för detaljsamordning av den större robotstriden, det vill säga rätt robot mot rätt mål.



Strid/vapnet rb 15
Robotsystem 15 är avsett för att bekämpa fartyg och använder aktiv radar för att hitta sitt mål. Denna hade en räckvidd på 100 kilometer. Robot 15 finns även i en luftburen version (RB 15F) avsedd för svenska flygvapnet. Den robot som fanns i förbandet var RBS 15 Mk II. Det var en utveckling av den robot som vid denna tidpunkt fanns i flottan. Den hade en del nya förmågor. Robotens stridsdel har en sådan storlek att den sänker landstignings- och transportfartygstonnage. Marinens robotar finns i en robottub och skjuts ut med hjälp av två startraketer. Turbojetmotorn startas upp under färden med startraketerna som släpps från roboten när turbojetmotorn börja verka. Roboten går sedan en programmerad bana och startar sin radarmålssökare enligt programmeringen för att slutligen gå mot sitt mål.


Förbandsutbildning och utnyttjande
Som nämnts tidigare i texten genomfördes förbandets första utbildning åren 1994-95. Förbandet ingick i krigsorganisationen från och med 1995-07-01. Utbildningen omfattade ett komplett förband förutom närskyddsplutonen. För krigsplacering av närskyddsplutonen utnyttjades motsvarande pluton från kustrobotbatteriet 08. En kompletterande utbildning av personal till förbandet genomfördes utbildningsåret 1997-98. Då utbildades en närskyddspluton och en trosspluton. För övrigt var det ett halvt förband som utbildades: en batteriledningspluton, en robotpluton och en mätavdelning. I och med denna utbildning var förbandet komplett utbildat med ny personal. Förbandet lades ner år 2000, vilket sammanföll med KA 2 nedläggning. Eftersom en kraftig reducering av försvaret genomfördes från senare delen av 1990-talet blev det aldrig aktuellt med en skarp krigsplanläggning för förbandet. Förutom de nämnda utbildningarna genomfördes en frivillig krigsövning under ett veckoslut då halva förbandet grupperades och gjordes stridsberett.

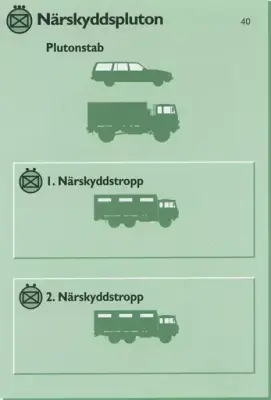
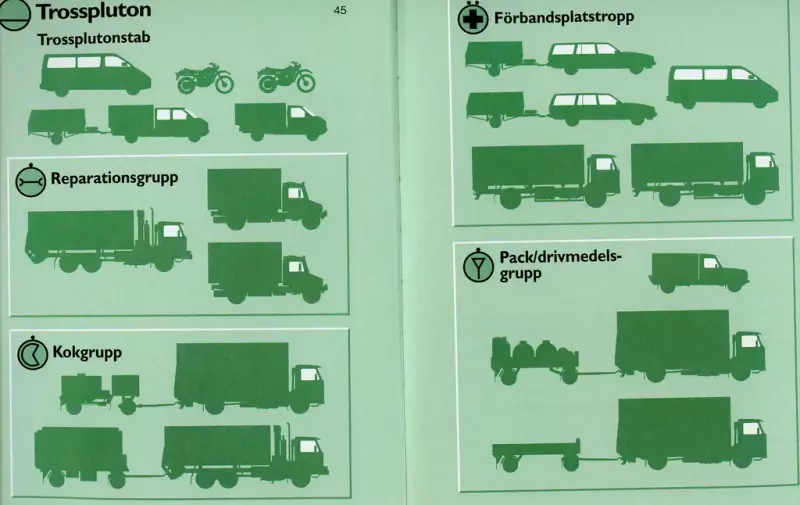
Mowag Piranha som visas i organisationsskisserna hann aldrig införas i förbandet innan nedläggning, men var under utveckling.
Författare Tommy Erlandsson med synpunkter från Rune Svensson, Peter Ling och Per Magnusson